Jerry (Qilong) Cheng 「程启龙」
I’m Jerry (Qilong) Cheng, a Robotics Ph.D. Candidate at the University of Toronto building the next generation of Embodied Intelligence — and I’m hopelessly, obsessively in love with robots. They’re the first thing on my mind when I wake and the last before I sleep; I can’t imagine spending my life on anything but building machines that move, sense, and think. I work with Prof. Jonathan Kelly in the STARS Lab (UTIAS), and began my Ph.D. at New York University with Prof. Ludovic Righetti (Machines in Motion). My mission is to engineer generalized, highly articulate robots for the home—vertically integrated systems designed to automate daily tasks, save us time, and seamlessly enrich our lives.
Research Vision
“We are born too late to explore the Earth and too early to explore the stars — but just in time to solve AI and robotics.” — Jim Fan
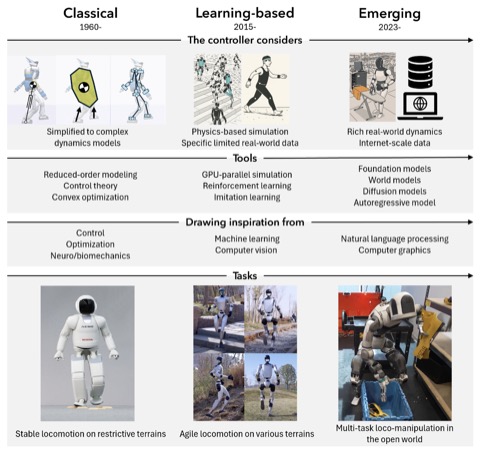
Robotics is the next field to be solved by learning at scale — like language, vision, and self-driving — and the bottleneck is data. I port the LLM playbook to hardware: pre-train a world model on egocentric and third-person human data (UMI, video, sim), fine-tune on real robot data, and refine with real-world RL. Solving robotics is the greatest thing we can do for human abundance and prosperity — the humanoid will be humanity’s greatest machine of this century.
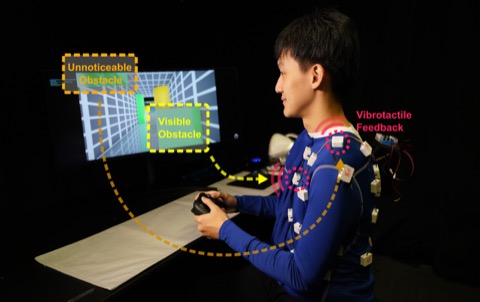
• Data & hardware co-design — scale low-cost human-demonstration capture (egocentric & third-person video, simulation), with the capture device and robot designed as one embodiment.
• Classical × learning — fuse SLAM, navigation, and whole-body control with learned policies, then fine-tune on hardware, not in simulation.
• Reasoning & auto-research flywheel — chain-of-thought and self-improving loops that let robots reason through long-horizon tasks and learn from their own experience.
Future to explore: multi-robot and human–robot collaboration — robots that coordinate with one another, and interface naturally enough to truly work with people.
I’m convinced robotics can only be solved full-stack — hardware, data, perception, control, and learning co-designed as one system, not bolted together after the fact. Building that entire pipeline end to end is the work I love. As Steve Jobs put it, “those who are truly serious about software should design their own hardware.”



. Photo: GoginkLobabi / Wikimedia Commons, CC BY-SA 4.0")