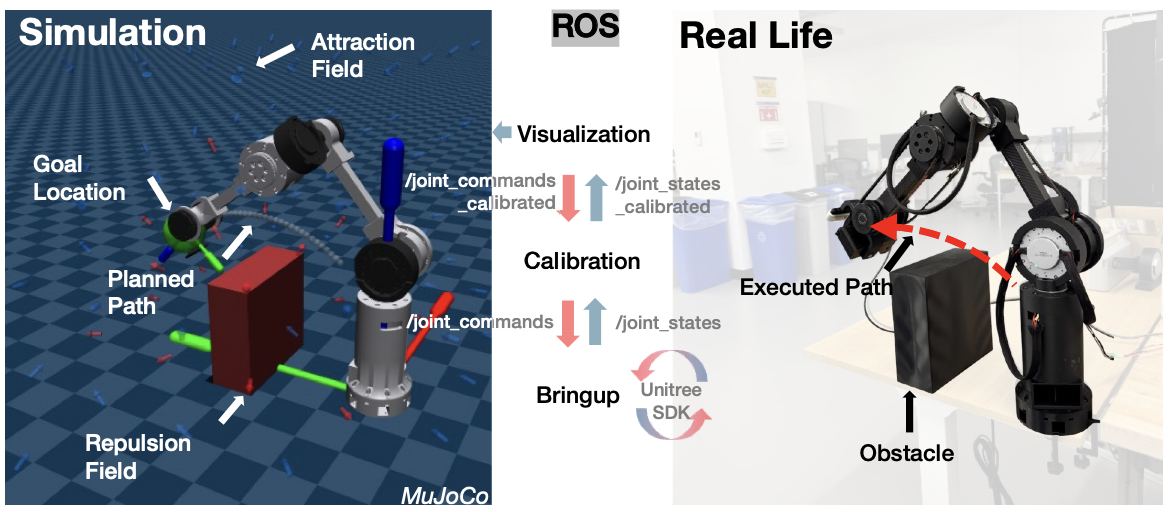
Node architecture.
All components live in unitree_arm_ros. The hardware driver is the core — everything else communicates over standard ROS topics.
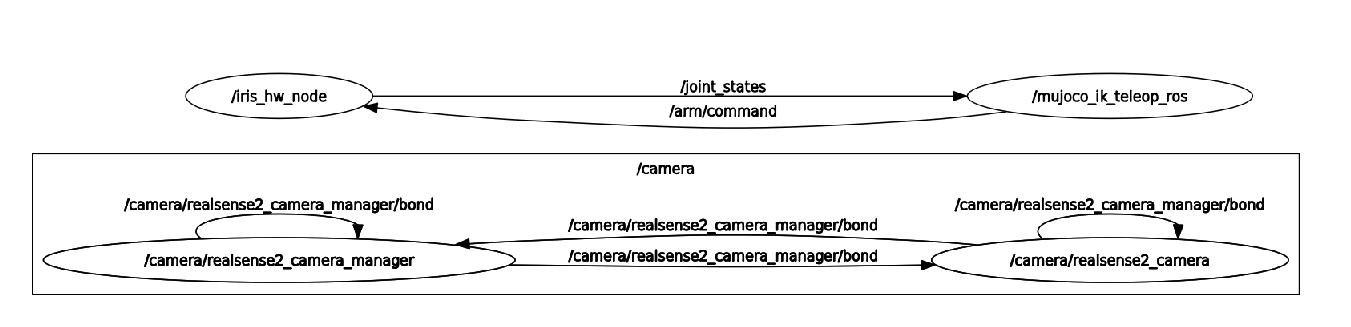
IRIS ROS node communication graph
iris_hw_node.py
Hardware driver. 200 Hz RS-485 loop, publishes /joint_states, subscribes /arm/command.
calibrate_joint_states.py
Applies encoder offsets from calibration.yaml and handles differential wrist coupling for joints 5 & 6.
keyboard_ik_teleop.py
IK-based keyboard control. Move end-effector in Cartesian space with WASD + arrow keys.
keyboard_teleop.py
Joint-space keyboard teleoperation. Direct joint angle control for calibration and collision testing.
mujoco_visualizer.py
Streams real joint states into MuJoCo in real time. Enables live sim–real visual comparison during operation.
teach_and_repeat.py
Kinesthetic teaching. Guide the arm by hand to record a trajectory, then replay at any speed.
Key Topics
| Topic | Type | Description |
|---|---|---|
| /joint_states | sensor_msgs/JointState | Raw encoder positions, velocities, torques @ 200 Hz |
| /joint_states_calibrated | sensor_msgs/JointState | Calibrated joint states with offsets applied |
| /arm/command | sensor_msgs/JointState | Target joint positions, velocities, feed-forward torques |
| /camera/color/image_raw | sensor_msgs/Image | RGB frames from RealSense D435 |
| /camera/depth/image_rect_raw | sensor_msgs/Image | Depth frames from RealSense D435 |