Mechanical Design
Structural layout.
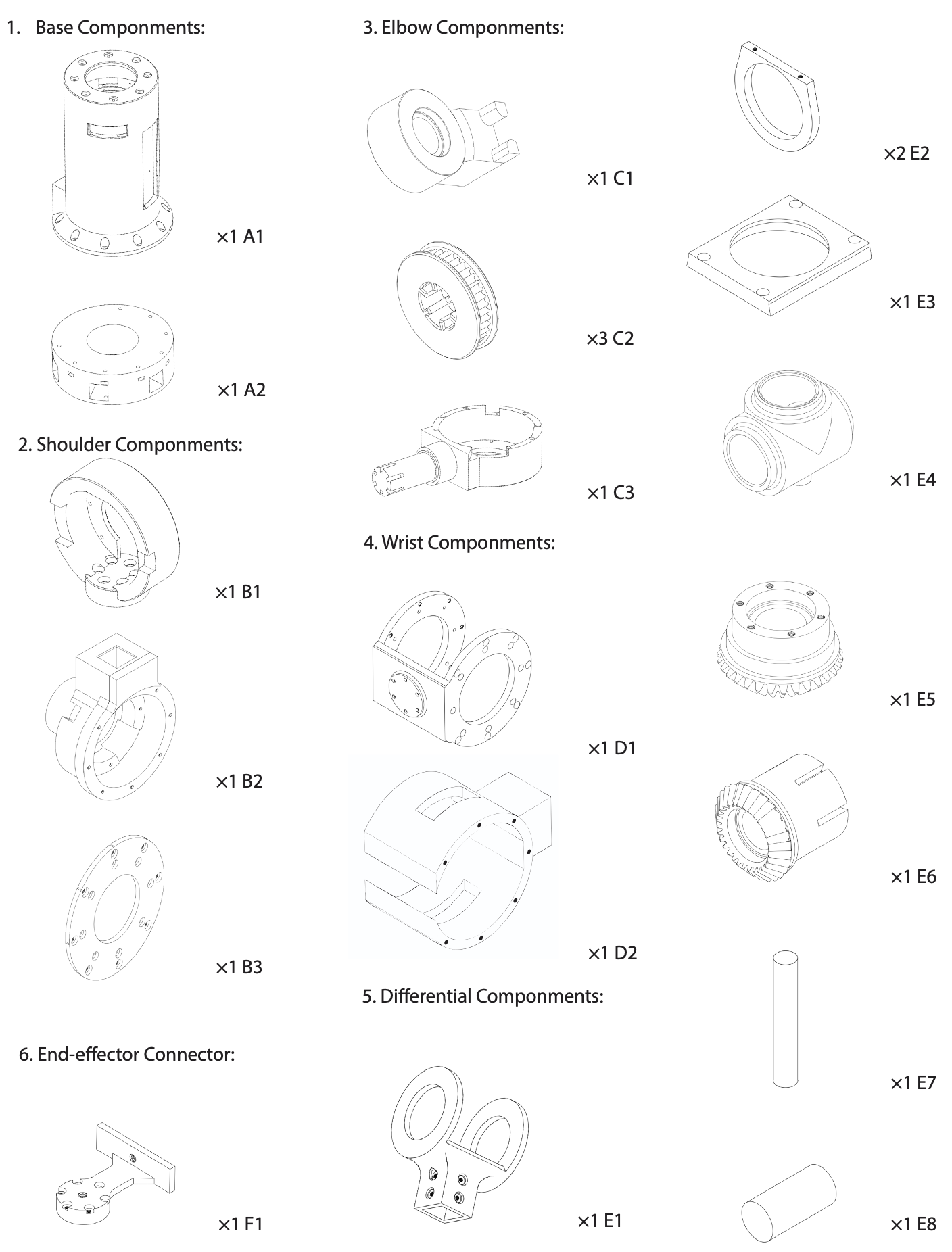
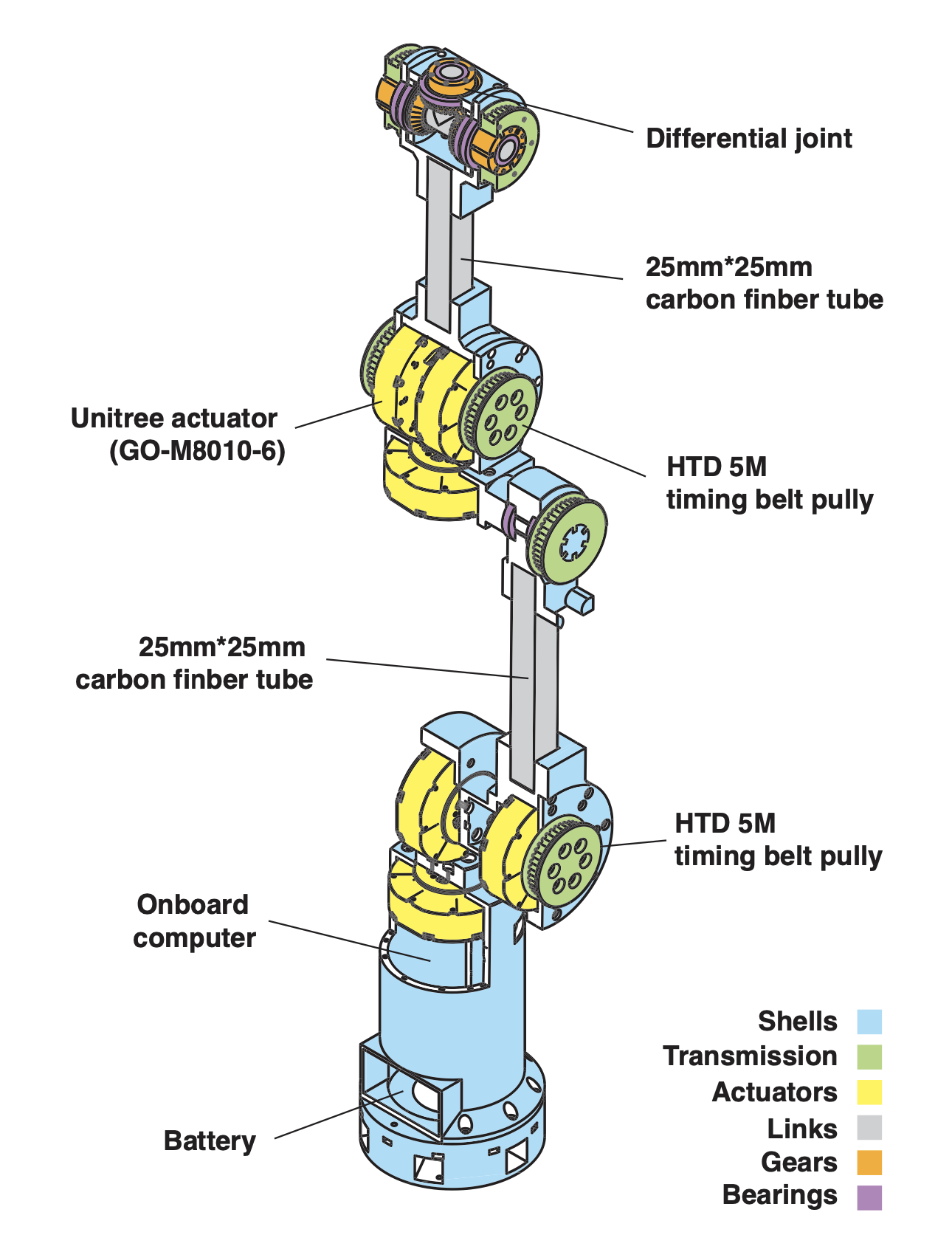
Six-link serial chain in a modified PUMA configuration. All structural components are 3D-printed PLA at 30% infill. Carbon-fiber tubes carry the primary bending load between shoulder and elbow.
Mechanical assembly — joint layout and link geometry

CAD render
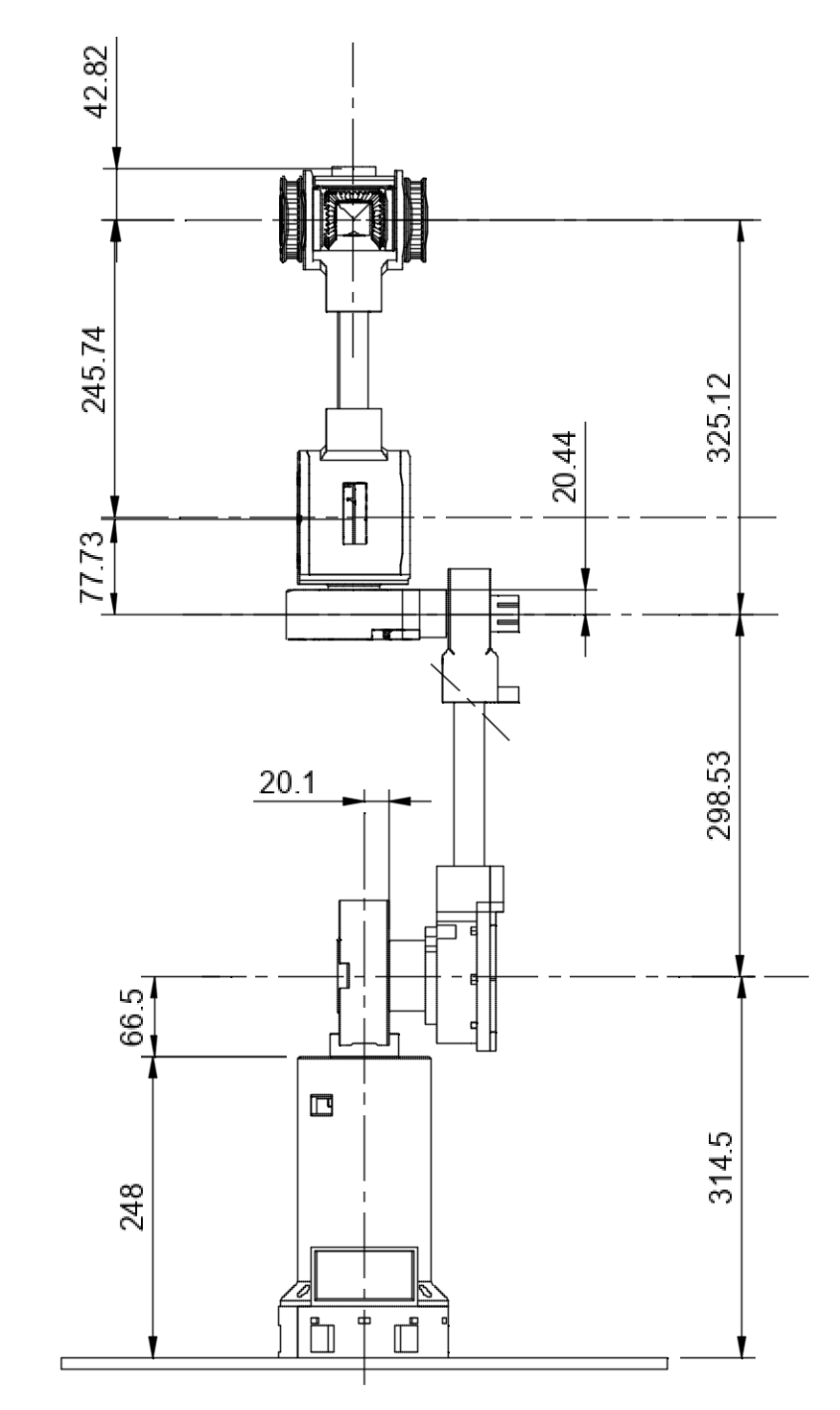
Workspace dimensions